拒绝机械模仿,
重塑生物本能。
业界首例人工肌肉仿生架构。
我们没造机器人,我们“复活”了生物面部。
为什么舵机是“死路”?
面部表情本质是非线性、可微分的连续运动。舵机拉杆是刚性传动,无法还原表情组合时的微小误差,而这些“微扰动”正是破解“面瘻脸”的关键。
舵机拉杆方案
金属拉杆 · 线性传动 · 开关嘴 · 面瘻脸
人工肌肉方案
柔性驱动 · 非线性 · 连续可微 · 生命感
物理极限的降维打击
3D 虚拟环境中实现真人级表情需要 5000 个自由度。在物理头部里塞入 5000 个舵机?工程学上 0 可能。
传统舵机方案
拉杆只能做直线运动,无法还原皮肤的挤压与拉伸。为了逼近真人效果,需要内置 5000 个电机 —— 这在物理空间上根本无法实现。
= 物理不可能
FACEGOOD® 人工肌肉
回归生物学。人类仅需 46 块表情肌就能组合出数万种表情。我们直接复刻了这套上帝设计的“最优解”。
= 完美复现
“肌肉的收缩是连续、可微分的。它是柔性的,能产生自然的非线性形变。结果:1:1 还原人类神态,从微笑到大笑,每一帧都顺滑自然。”
一个“嘟嘴”,难倒了所有舵机机器人。
口轮匝肌 (Orbicularis Oris) 是人脸最复杂的表情肌之一。嘟嘴这个看似简单的动作,却是检验仿生技术的终极试金石。
舵机方案的困境
极其复杂且僵硬FACEGOOD® 人工肌肉
回归生理本源“越复杂的运动,往往只需要最简单的原理。在人工肌肉架构下,看似复杂的口型变化,不过是一次自然的物理收缩。”
170 维的“神经信号”。
仿生头直接读取来自 EQ 大脑的 170 维时序非线性信号。这不再是简单的“开关嘴”指令,而是 0-100% 连续可调的肌肉激活度。
EmotionAI 实时解算的时序非线性信号
边缘端响应速度,“脊髓反射”级别
无级肌肉激活度,拒绝二极管逻辑
170 维信号频谱分布
肌肉激活度连续可调 (0-100%)
拒绝“开/关”式二极管逻辑,每块肌肉均可 0-100% 无级调节
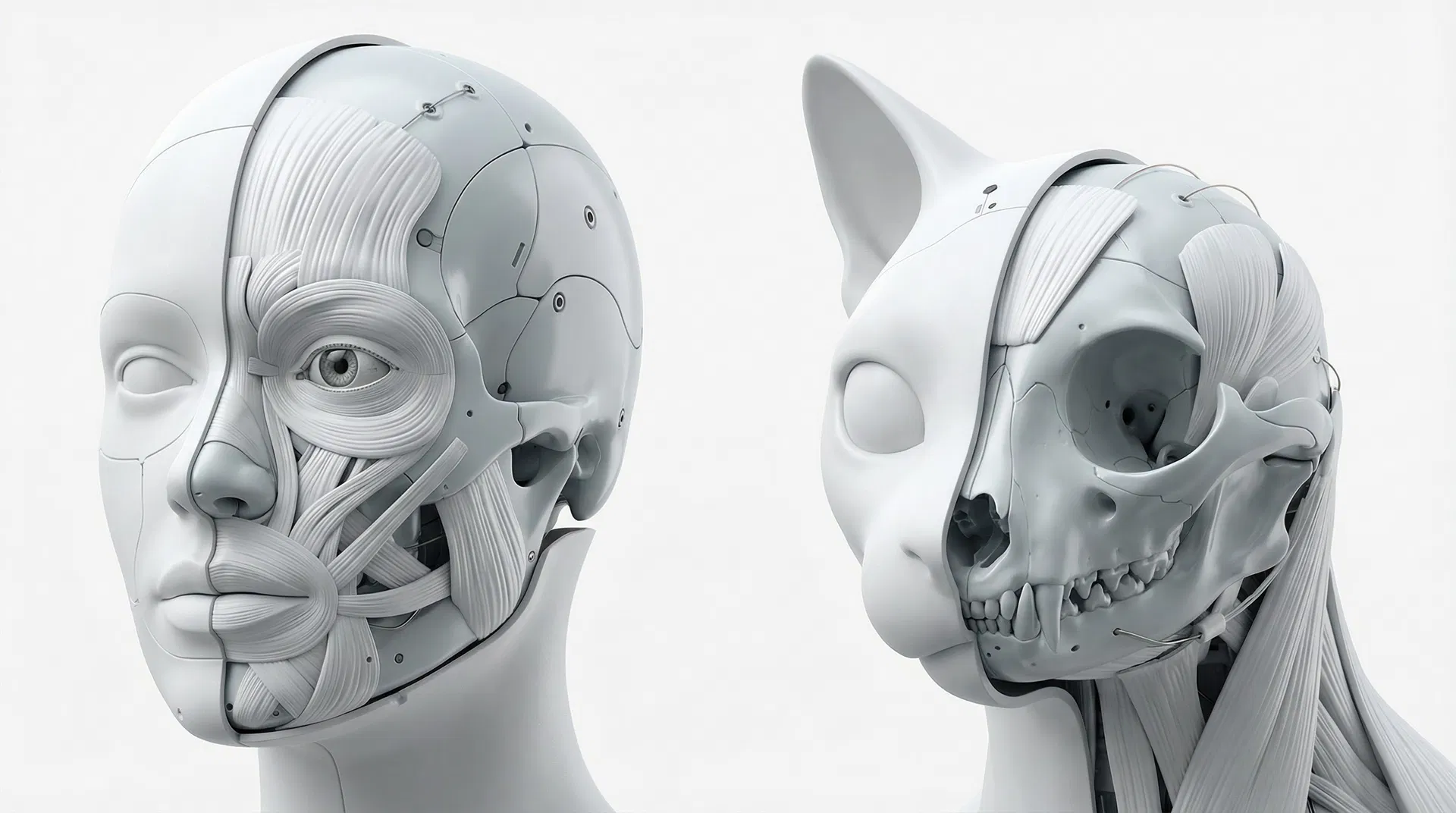
创始人的愿景。
“所有最优解都在自然界。生物的面部就是一个标准化的拓扑结构。基于此,我们打造的仿生头是一个通用的硬件底座。我们可以低成本地将它平移到机器猫、机器狗身上,无需重新发明轮子。”
一次研发,跨物种复用。
大幅降低具身智能产品的迭代成本。
人形机器人
研发中46 块标准表情肌拓扑,完整复现人类情感表达
猫形伴侣
规划中基于猫科面部肌肉拓扑适配,保留核心驱动架构
犬形伴侣
规划中基于犬科面部肌肉拓扑适配,共享标准化驱动层
标准化拓扑 = 无限可能
同一套人工肌肉驱动架构,通过调整拓扑参数即可适配不同物种形态。这意味着每开发一个新形态的边际成本趋近于零,为规模化商业落地提供了坚实的技术底座。